 原田研究室
原田研究室進化計算
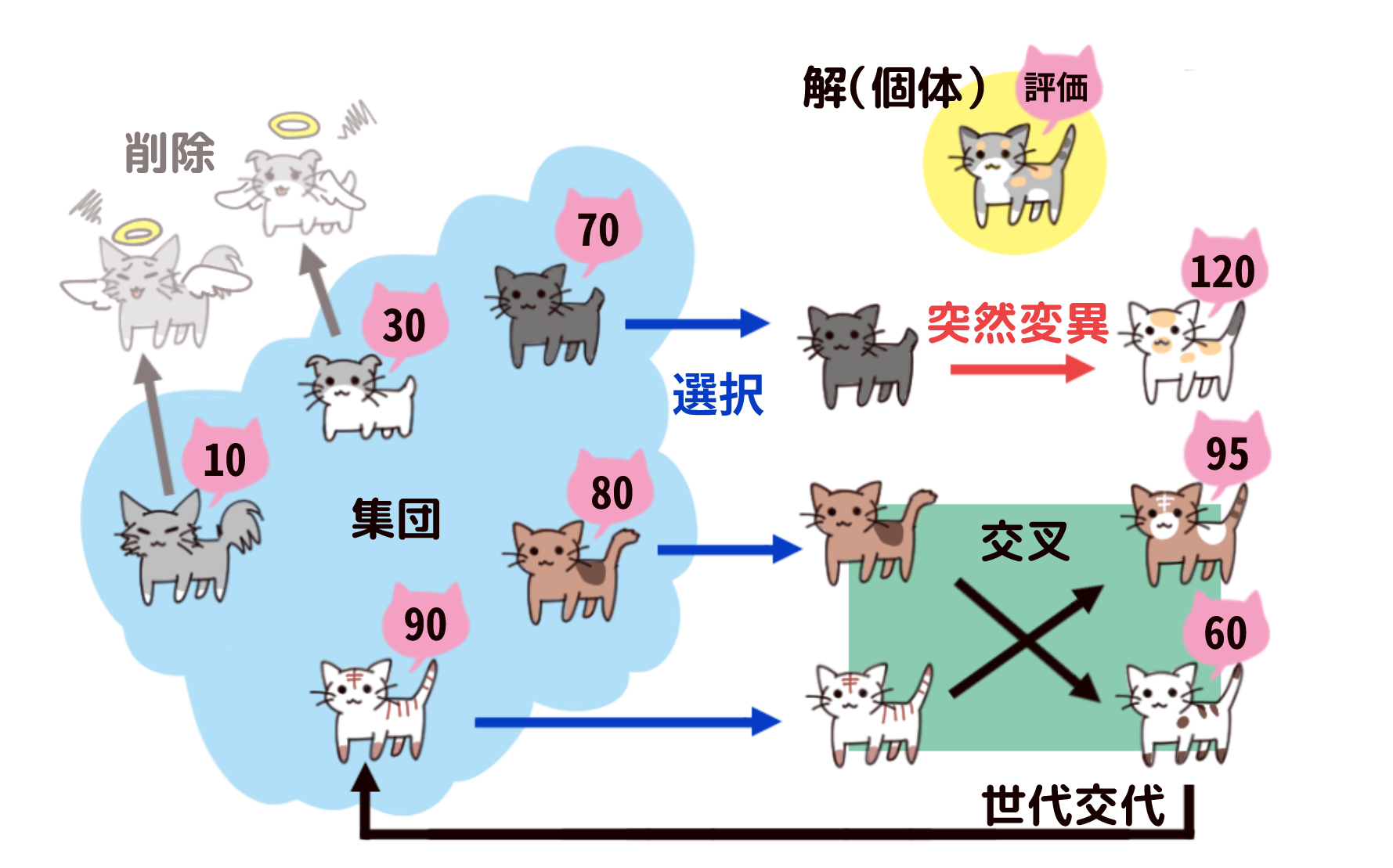
進化計算は,生物進化のメカニズムに着想を得た最適化手法であり,未知の特性を持つ問題にも適用可能です.代表的な進化計算手法として,遺伝的アルゴリズムや遺伝的プログラミング,進化戦略などがあります.進化計算はその汎用性と探索性能の高さから工学設計や産業界など幅広い分野で活用され,例えば新幹線N700系の先頭車両デザインなどにも応用されています.
利用者向け進化計算
進化計算を実際に利用する際には,問題設定の仕方やベンチマーク環境の整備が利用者にとって大きな負担となることがあります.当研究室では,進化計算をより使いやすくするために,利用者を支援する枠組みの研究に取り組んでいます.
進化計算×大規模言語モデル
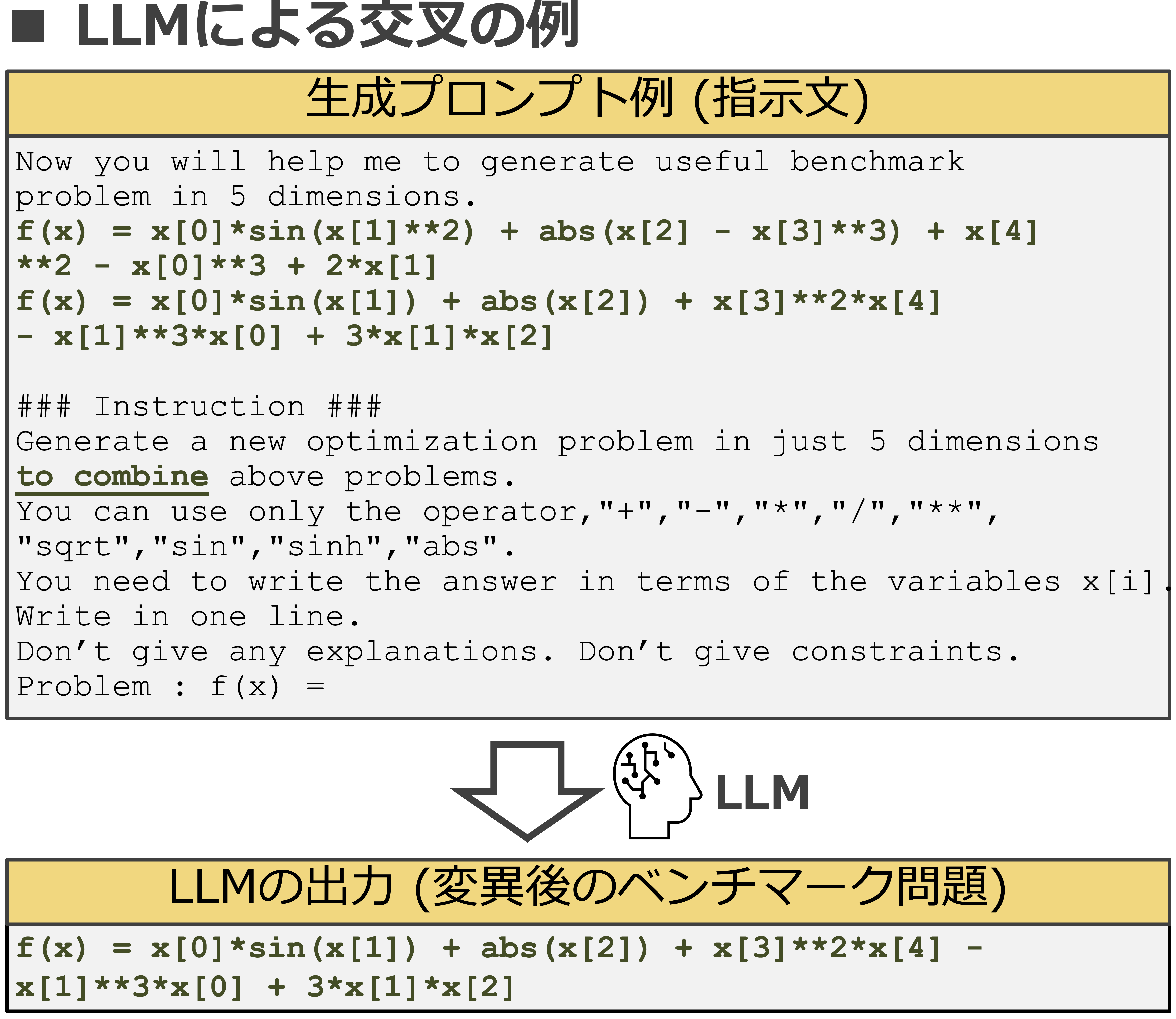
近年,大規模言語モデル(LLM)は自然言語処理分野で著しい進展を遂げており,進化計算と組み合わせる研究も進んでいます.当研究室では,LLMによる高度な自然言語処理能力と進化計算の最適化処理を組み合わせる手法を研究しています.具体的には,進化計算を含む最適化アルゴリズムの評価に重要なベンチマーク問題を数式やプログラムコードの形式で記述し,LLMと進化計算を連携させることで,多様性を備えたベンチマーク問題を自動生成するアルゴリズムの研究に取り組んでいます.
最適化問題の特性理解のための進化計算
進化計算を含む最適化アルゴリズムは,利用者が与える問題設定の中で探索するため,対象問題の知識不足や先入観によるバイアスによって適切な問題設定ができない場合,利用者の要求を真に満たす最適解を発見することはできません.そこで,利用者によって最初に与えられる問題設定が不完全なものであるという前提に立ち,問題設定自体の特性を理解し,問題設定の修正と最適化の反復プロセスを促進する進化計算フレームワークを研究しています.具体的には,最適化問題の制約設定に関する分析や,複数の最適解を同時に探索可能するための進化計算手法の確立に取り組んでいます.
高効率進化計算
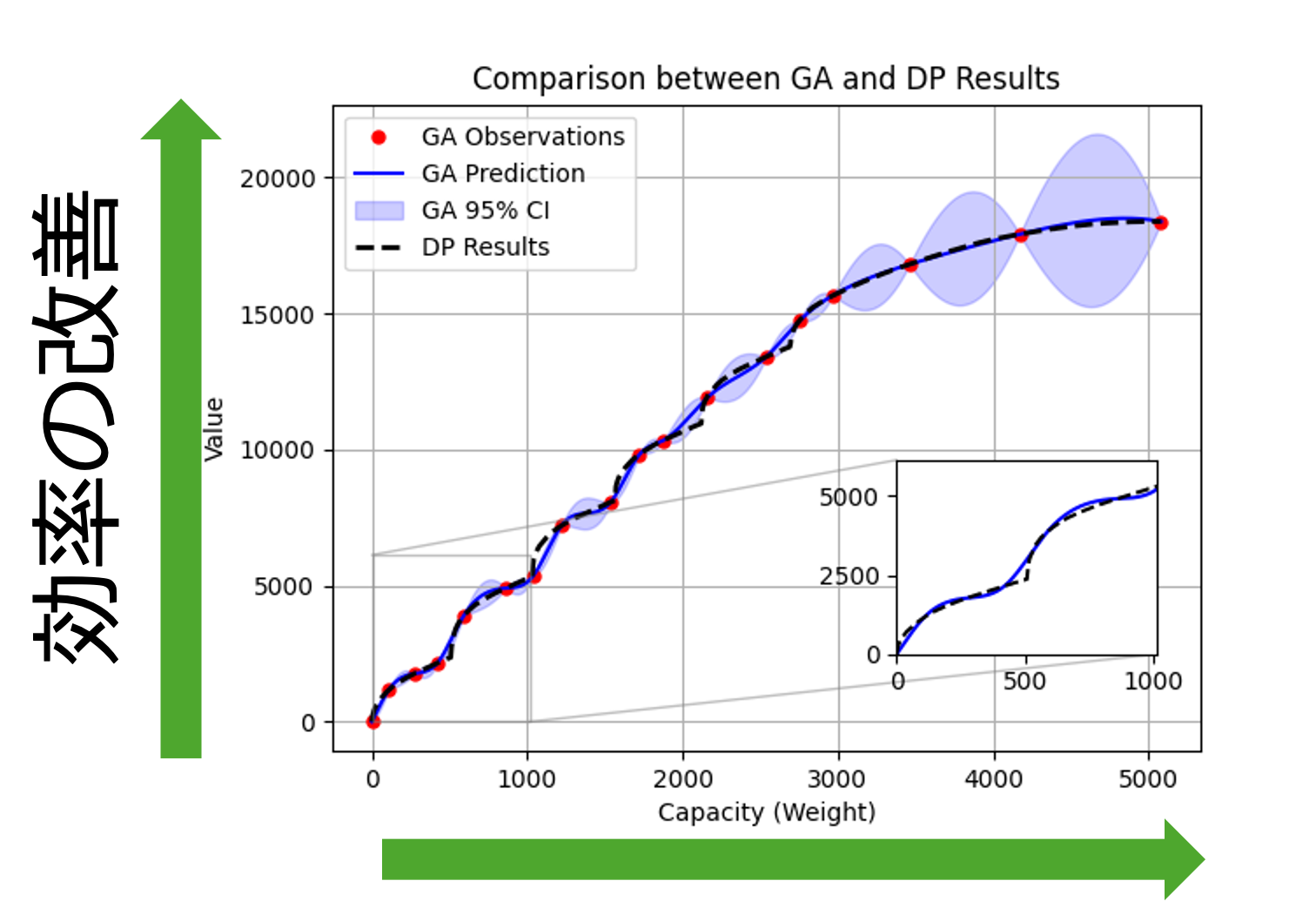
実世界の最適化問題では,解を評価するためにシミュレーションや複雑な数値計算,人手による評価など膨大な計算コストが必要な問題が存在します.そのため,これらの高コストな最適化問題に対する進化計算の効率化が重要な研究課題となっています.この課題に対する研究の一環として,当研究室は並列進化計算やサロゲート型進化計算の研究に取り組んでいます.
サロゲート型進化計算
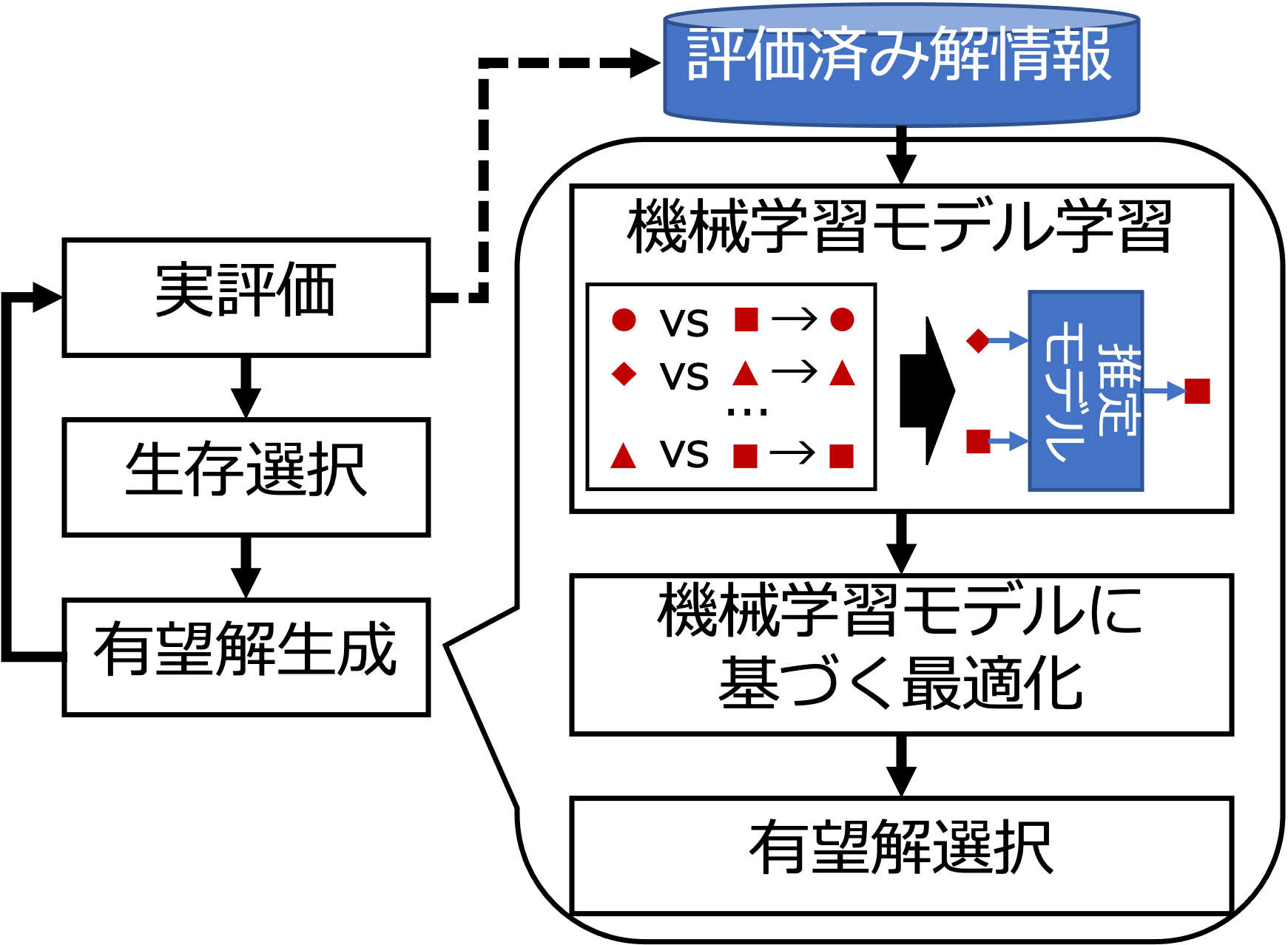
進化計算は最適化の過程で莫大な回数の解評価を実行するため,最適化に要する実行時間が増大する問題があります.この問題を解決するために,機械学習モデルを用いて解評価値を推定しながら最適化するサロゲート型進化計算を研究を進めています.具体的には,新しいサロゲートモデルの開発や,サロゲートモデルの精度がサロゲート型進化計算の探索性能に与える影響の分析に取り組んでいます.
並列進化計算
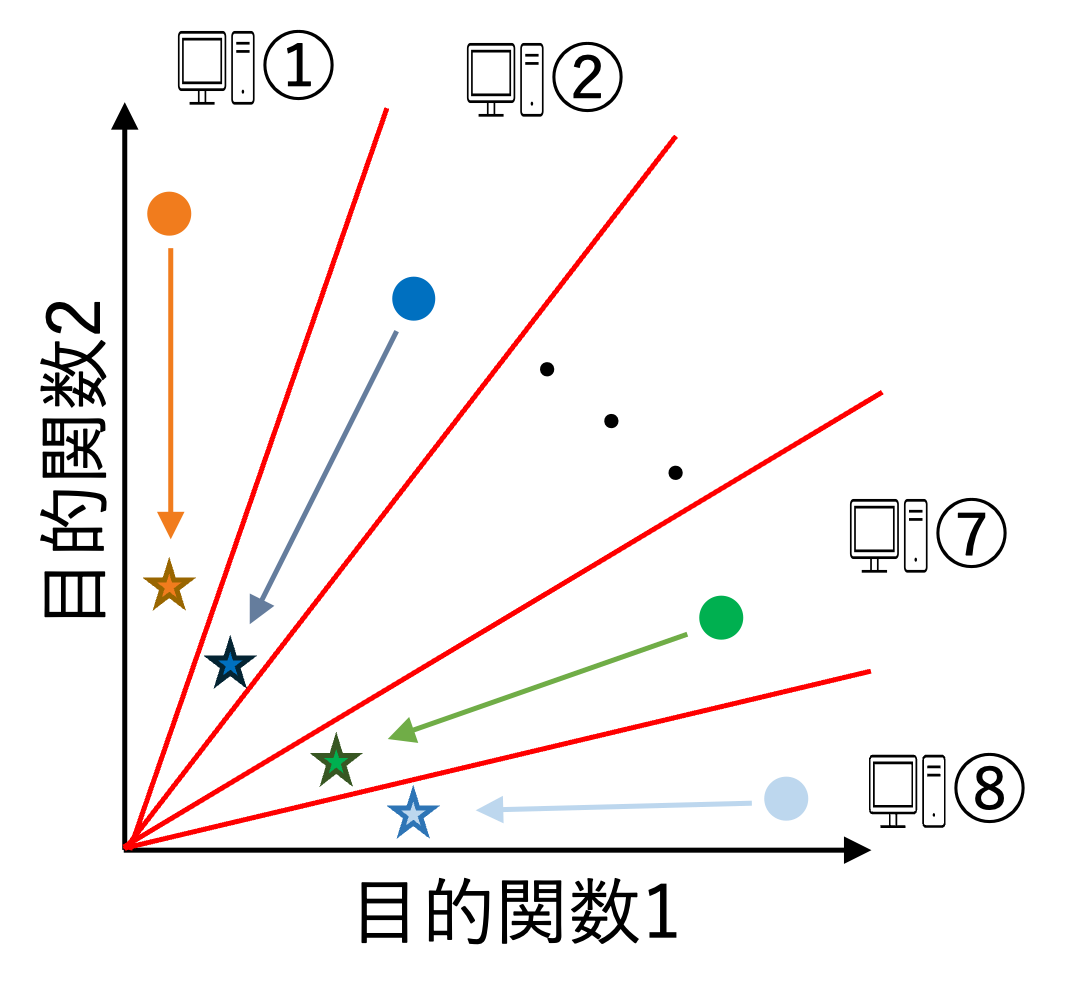
進化計算の計算効率と探索性能向上のために,複数の計算機で進化計算を並列実行する並列進化計算を研究しています.具体的には,一つひとつの解の評価時間に不均一性がある場合に並列進化計算の探索性能が低下する問題を解決する方法として,並列計算機の評価待機時間を削減する半非同期並列進化計算を研究や,探索頻度を考慮した親選択法を提案しました.また,計算機間の通信トポロジーを最適化することで多目的進化計算の通信オーバーヘッドを削減する手法も研究しています.
エネルギー消費量の少ない進化計算
近年,生成AIに代表される大規模なAIシステムでは,計算量と消費電力が飛躍的に増大し,AIの消費電力や水消費といった環境負荷への配慮が喫緊の課題となっており,AIシステム全般での省電力化に向けた技術革新が強く求められています.進化計算においても,高コストな解評価が必要な実世界の最適化問題では消費電力を低減する工夫が重要となります.このような課題に対し,当研究室では,進化計算における消費電力を削減するために,省電力なサロゲートモデルを活用することで,探索性能を維持しつつ消費電力を低減する方法を研究しています.
機械学習(強化学習)
強化学習を用いた協調自動運転
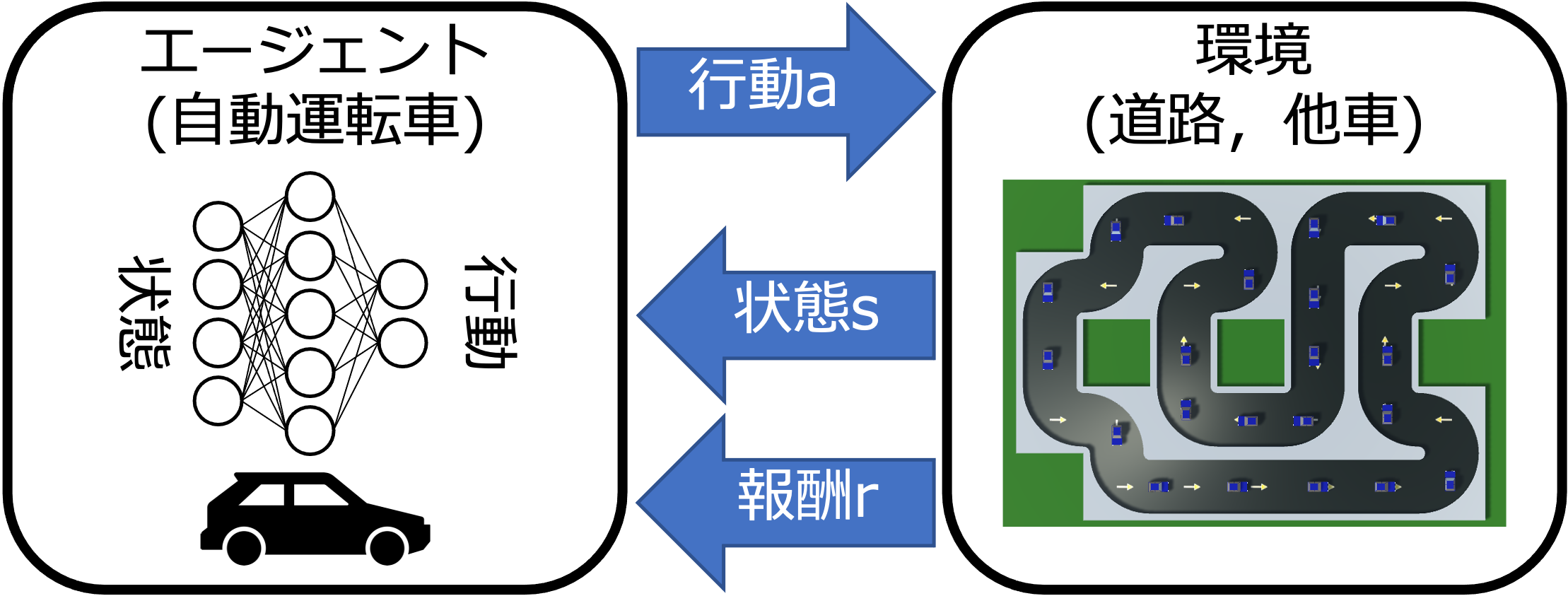
自動運転車の今後の普及を見据えて,道路上で自動運転車のみが走行する場合に,適切な制御方法を強化学習を通じて獲得する方法を考案しました.具体的には,車両に搭載された距離センサと車車間通信から得られる局所的な情報だけを使って,速度の異なる複数の車両が道路上で衝突なく走行できることを確認しました.